ROSMicroPy
Creating the Development Environment container
Overview
The Development Environment is a container that has pre-installed and configured all the development tools that are needed to Compile, Flash and Monitor a ROSMicroPy device.
Requirements
- Computer with Docker installed
- A terminal program to give you command line access.
- Its helpful if you have a terminal program that will multiple sessions in one window. This saves on space and allows you to collapse all of your container sessions as a single operation.
How to Build
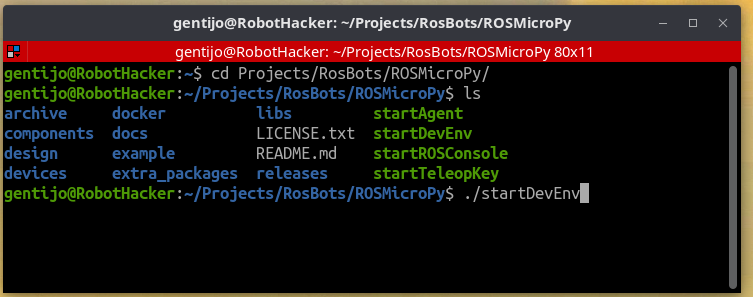
- Change your working directory to be where you checked out the ROSMicroPy repository.
- Run the shell script, startDevEnv, this will build then run the container.
- You can either work from the command line once the container launches, or use Visual Studio code attach to the running container via Remote Explorer and have a full IDE that will give you command line access and be able to easily transfer files.
-
The current working directory will automatically be mounted to the running container and will be present at /opt/rosmicropy
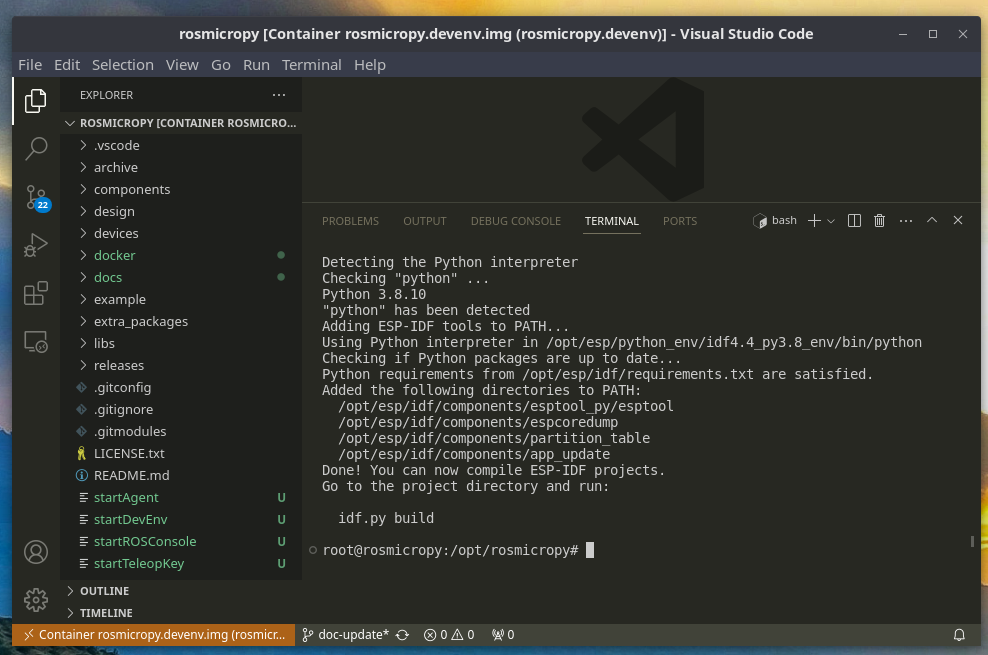
- Here is an example of a terminal running on the host system would look like when you want to run the container.
- If you are using VS Code, you no longer need to run the startDevEnv script as VSCode will auto start and attach to the container.
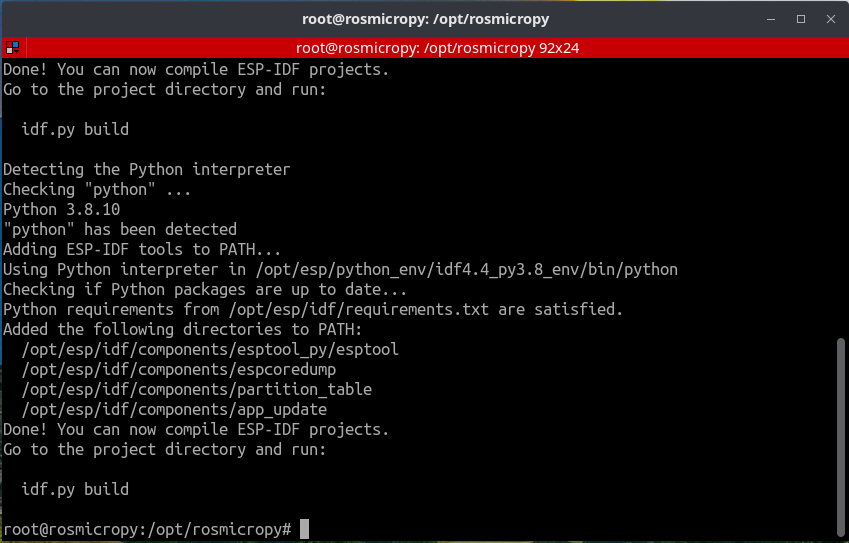
When the build is complete you will have a shell prompt in your container at the project directory inside the container
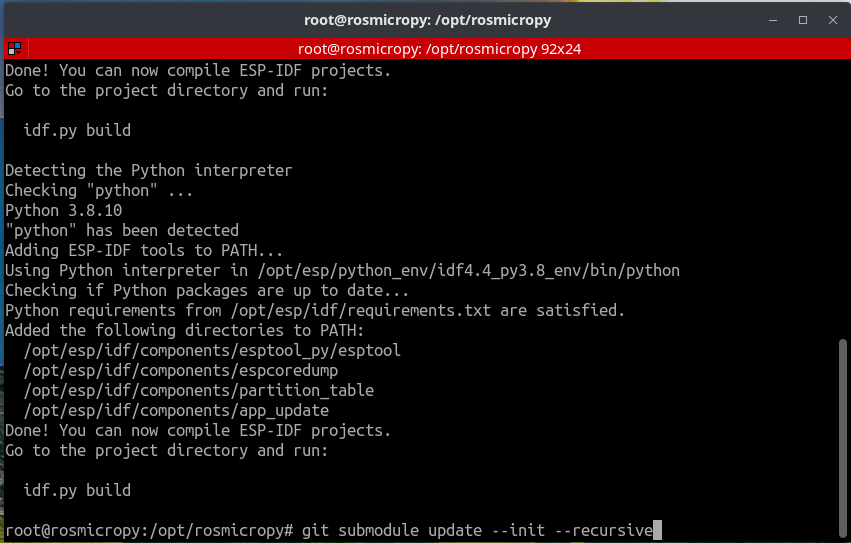
The first time you are using your Dev Env container, you need to initialize and update all the submodules of the project by running
git submodule update --init --recursive
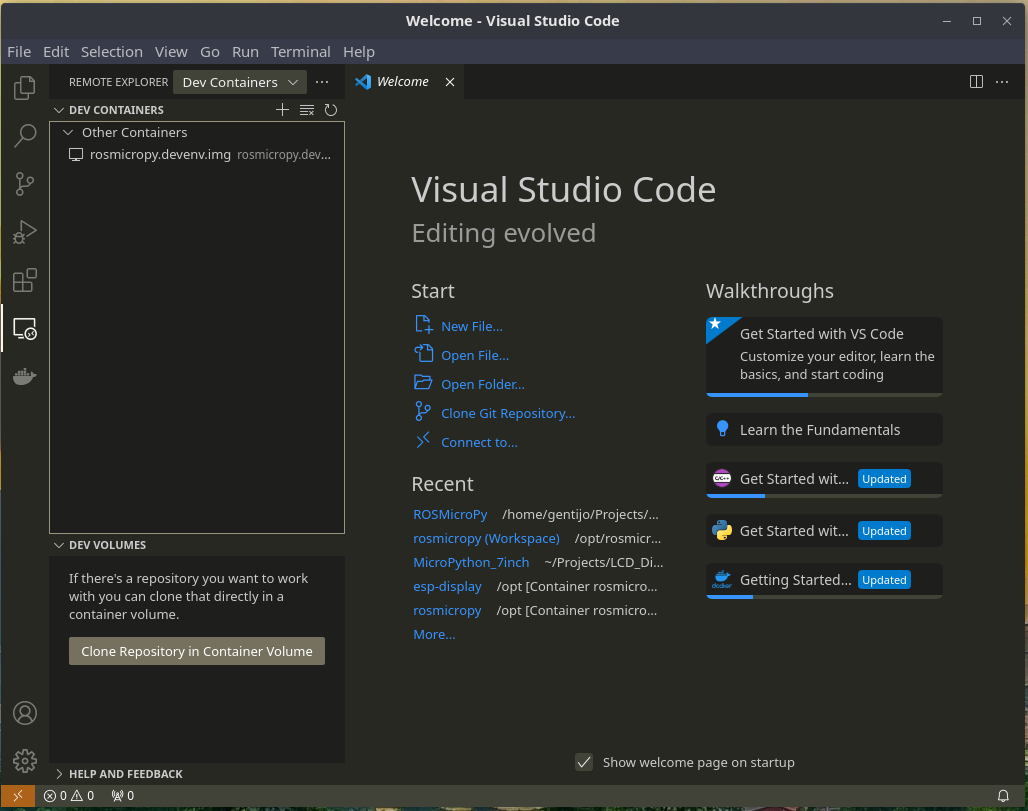
To attach to VS Code, install VSCode along the following VS Code extensions
- Remote Explorer
- Remote Development
- Dev Containers
Open VSCode and select Remote Explorer, you should see the rosmicropy container
Opening your workspace folder
- Attach to the container then use the Open Folder command to open /opt/rosmicropy**
- Your Repo files should now be visible in the explorer
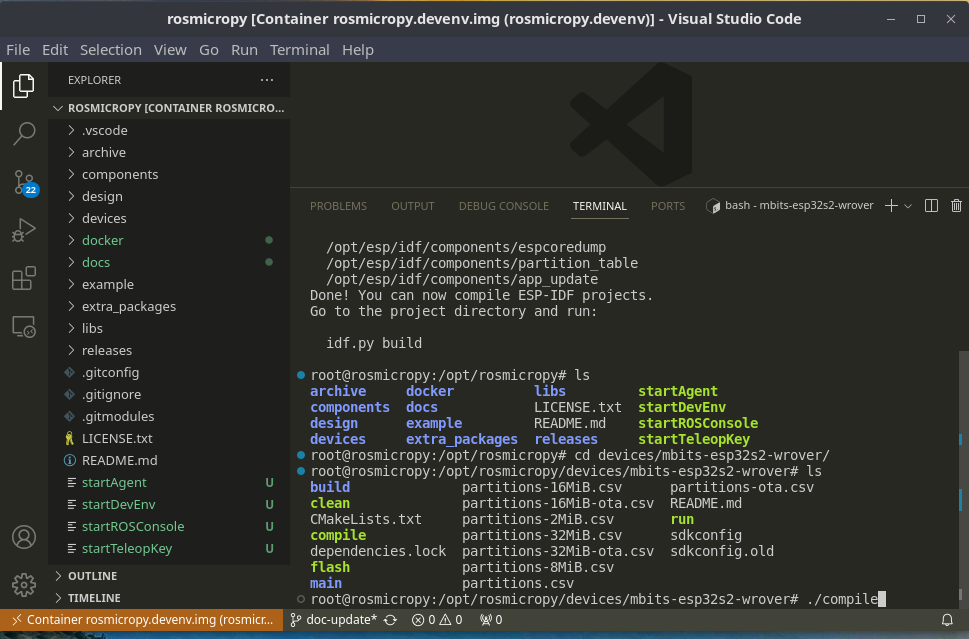
How to compile the code
- From your project directory, cd to the devices/mbits-esp32s2-wrover directory
- This device should support all of the esp32s2 SoC chips
Run the compile process by running the ./compile shell script
On a successful compile you should see the following message
Successfully created esp32 image.
Generated /opt/rosmicropy/devices/mbits-esp32s2-wrover/build/mbits-esp32s2-wrover.bin
[21/21] cd /opt/rosmicropy/devices/mbits-esp32s2-wrover/build/esp-idf/esptool_py && /opt/esp/python_env/idf4.4_py3.8_env/bin/python /opt/esp/idf/components/partition_table/check_sizes.p...0 partition --type app /opt/rosmicropy/devices/mbits-esp32s2-wrover/build/partition_table/partition-table.bin /opt/rosmicropy/devices/mbits-esp32s2-wrover/build/mbits-esp32s2-wrover.bin
mbits-esp32s2-wrover.bin binary size 0x18e000 bytes. Smallest app partition is 0x1f0000 bytes. 0x62000 bytes (20%) free.
Project build complete. To flash, run this command:
/opt/esp/python_env/idf4.4_py3.8_env/bin/python ../../../esp/idf/components/esptool_py/esptool/esptool.py -p (PORT) -b 460800 --before default_reset --after hard_reset --chip esp32 write_flash --flash_mode dio --flash_size detect --flash_freq 40m 0x1000 build/bootloader/bootloader.bin 0x8000 build/partition_table/partition-table.bin 0x10000 build/mbits-esp32s2-wrover.bin
or run 'idf.py -p (PORT) flash'
Flashing your device
Attach your ESP32 device to a serial port and run
./flash
This should load code into your device.
Follow the instructions to set up your Python dev Env to start running code
A note about different Operating Systems
This should work out of the box for Mac or Linux and Windows with WSL2 installed Your milage may vary with non-WSL2 Windows and is out of scope for this project