ROSMicroPy
Creating a container to run the ROS Console
This is a specialized container that will allow the user to run ROS graphical apps by utilizing a connection to the Hosts XWindowing System
- For Linux
- This should run out of the box, no special attention required
- For Mac
- You will need to verify that XQuartz is installed. XQuartz is EOL but you can still find it.
- For Windows
- With WSL2 Ubuntu Installed
- An XWindows server needs to be installed
- The Repo and containers run from a Linux Terminal
- Docker and Thonny are installed on the Windows side
- On plain Windows
- Good luck, will need some love and care. - One of the larger issues is that windows does not support the /dev file system
- List of XWindows server for windows
- This is not am endorsement for a specific XWindows server, this is just what came up from a Google search
- Your milage may vary with each of them
- https://x.cygwin.com
- http://www.straightrunning.com/XmingNotes
- https://sourceforge.net/projects/vcxsrv/
- With WSL2 Ubuntu Installed
The main Docker mechanism to support this mode includes
- Running in privileged mode
- Mapping the Dev file system to the container
- Mapping the Unix socket that communicates to the XServer to the container.
xhost command needs to be installed (called from start script) to allow permissions.
Currently this is set to * allowing any access to the XWindows system, if you would like to narrow this access, read the XHost man pages and use xhost to remove the access or just reboot your computer.
An XWindows server does not allow a remote program to run a program on your host system. It allows a remote program to open a windows on the host system and display its interface there.
Requirements
- Computer with Docker installed
- A terminal program to give you command line access.
- Its helpful if you have a terminal program that will multiple sessions in one window. This saves on space and allows you to collapse all of your container sessions as a single operation.
How to Build
- Change your working directory to be where you checked out the ROSMicroPy repository.
- Run the shell script, ./startROSConsole, this will build then run the container.
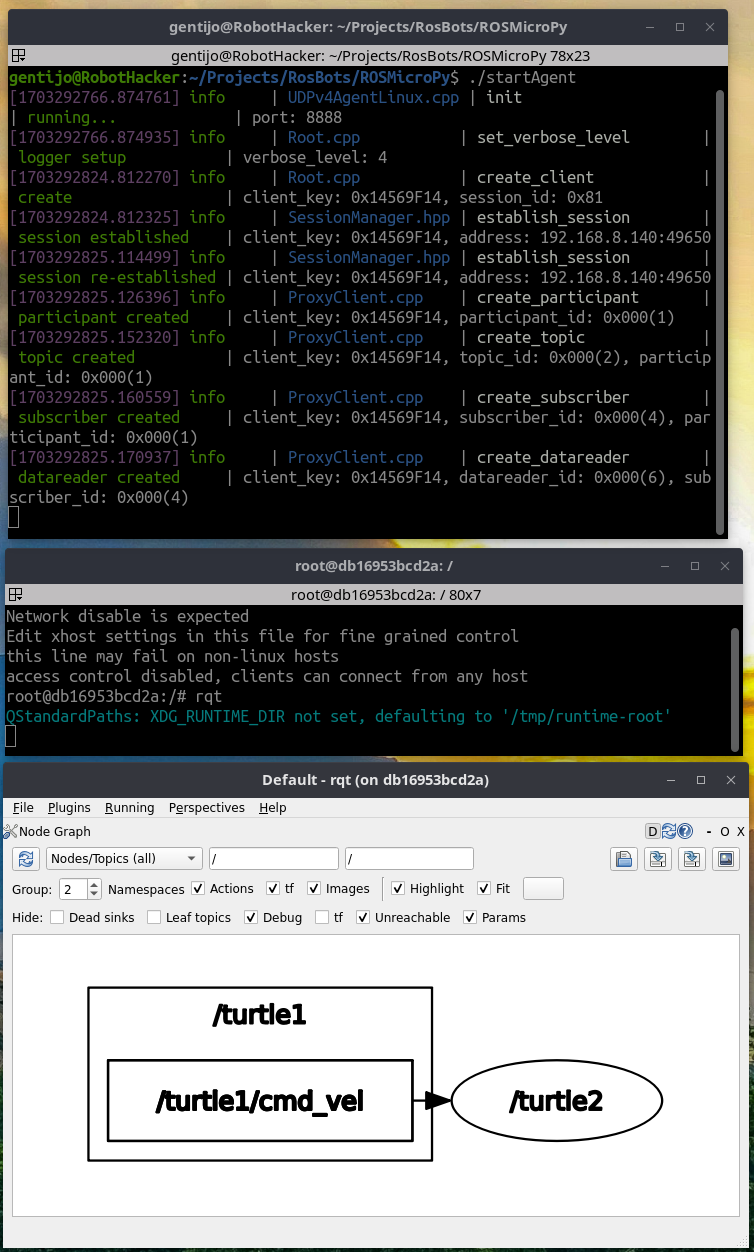
From the command prompt you should be able to launch any ROS GUI app, rqt is best for debugging the setup