ROSMicroPy
Firmware Development Environment
Prerequisites
-
Build and run the Agent Container
-
Build and run the TeleopKey Container
-
Install and run Thonny
Optional Components
-
Build and run the ROS Console Container
-
From the ROS Console, run the rqt GUI App
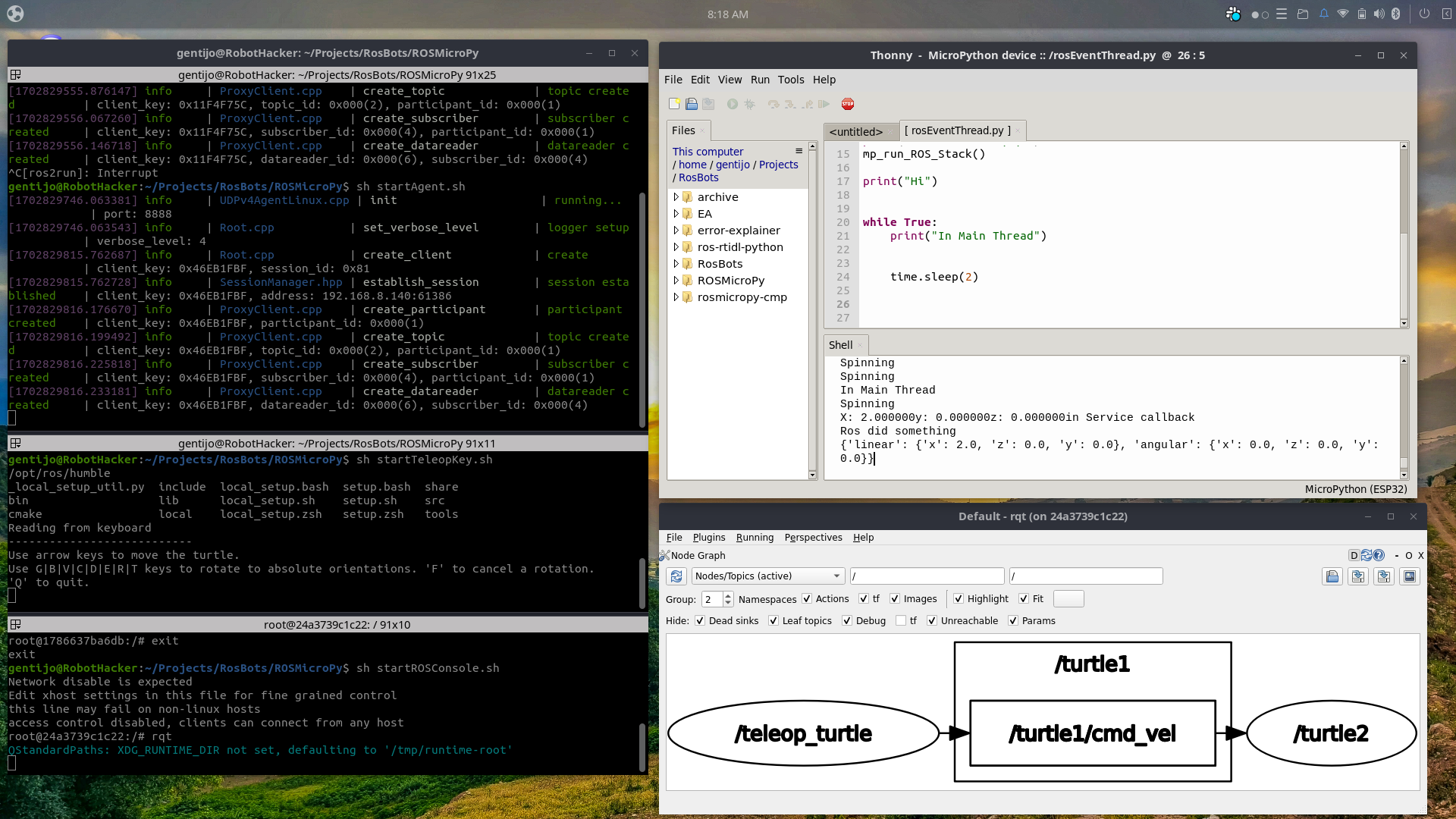
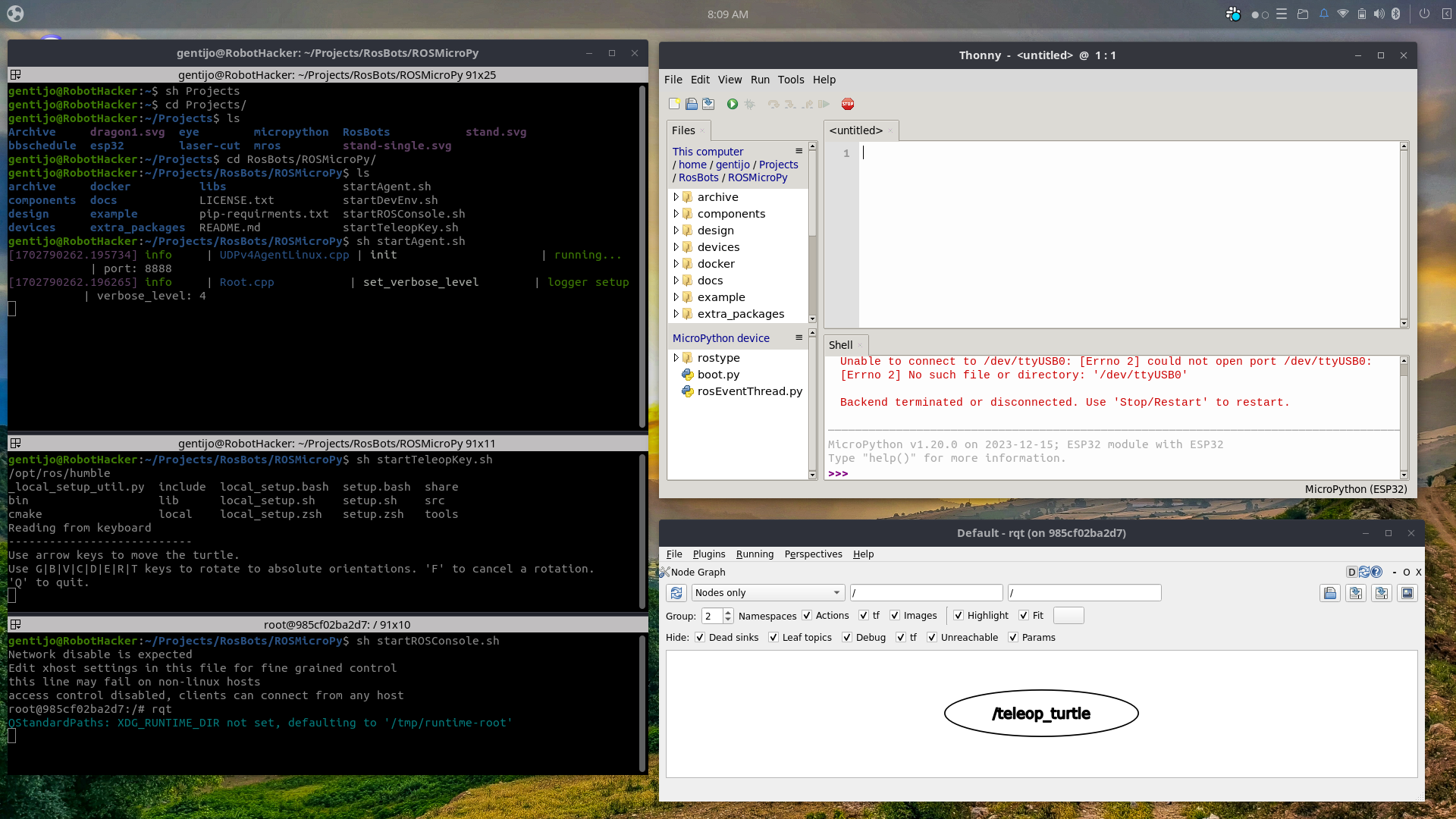
Suggested Screen layout
-
Arrange terminals running the required containers, arrange them as a stacked array on the left hand side of the screen. A terminal program that supports splitting the window horizontally, makes window management easier
-
Open the Thonny and arrange it on the top right of the screen
-
Move the rqt bottom bottom right hand of the screen.
-
Visual Code Studio can be loaded on another Desktop allowing you to switch from the compiler for the firmware, to the configuration to perform Python development.
-
Sample Python code is located in the example directory
-
The sample code can be loaded on the device by dragging it from the top (Local Directory) down to the device directory.
-
To start the ROS System and register to receive /cmd_vel messages with the data type of geometry_twist